
Lessons Learned – by Pat Carson

A special welcome to Jillian Humphreys who joined the Yachtsman family last month. Her first article appeared in the July issue, and I am looking forward to her monthly contributions. Welcome aboard.
Iron Mike
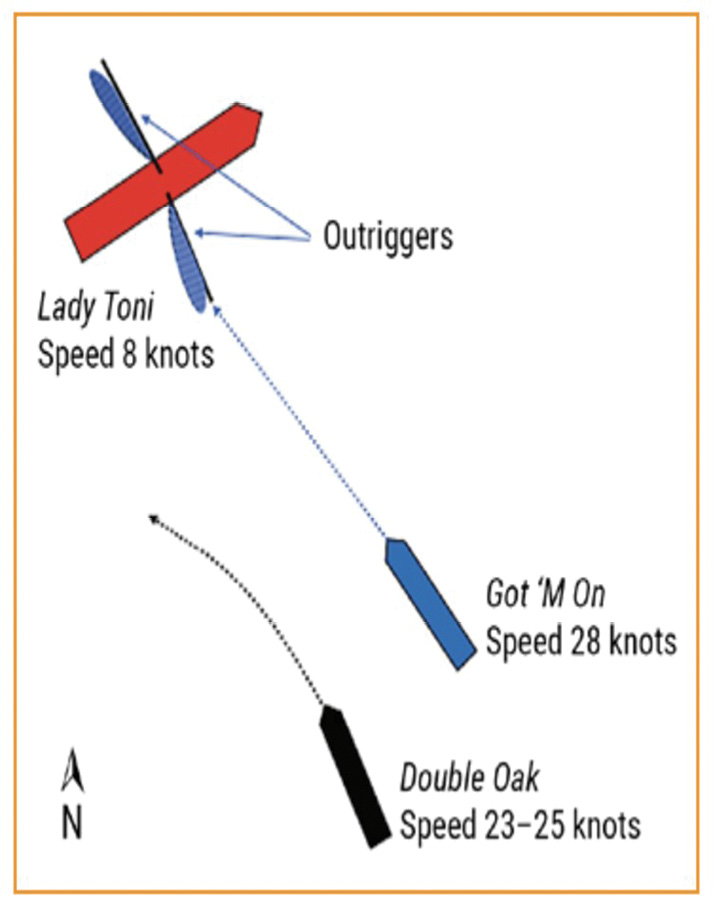
On the afternoon of July 28, 2018, the sportfishing vessel, Got ‘M On collided with the commercial fishing vessel Lady Toni about 105 miles east of Corpus Christi, Texas. The Got ‘M On began flooding and all eight persons aboard disembarked to a good Samaritan vessel before the sport fishing boat sank. No pollution or injuries were reported. The value of the Got ‘M On was $1.2 million, and damage to the Lady Toni was about $250,000.
The Got ‘M On left Port O’Connor, Texas on July 26, 2018 at about 1700, and headed east about 128 miles to the Hoover-Diana spar platform with a total of eight persons aboard to participate in a fishing tournament. One of the persons served as captain and another as mate. On July 28 at about 0930 they hooked a blue marlin and fought it until about 1300 when they hauled it on board. The captain navigating the Got ‘M On from the flying bridge commenced the return to have the marlin weighed in Port O’Connor. About 1530, the captain overtook the sportfishing vessel Double Oak, which was also participating in the tournament, on that boat’s starboard side. No one else was with him on the flying bridge and the only vessel he recollected seeing visually or by RADAR, which was set to a six-mile range, was the Double Oak. With the vessel’s speed at about 28 knots, he set the vessel to autopilot and went below to perform a visual check of the engines, which he said took about 45 seconds. Instead of heading back to the flying bridge, he proceeded to the saloon to talk to the owner for two or three minutes about the marlin they had caught. While talking to the owner, he saw the tip of an outrigger appear in the starboard window of the saloon. Immediately afterward, at 1548, the vessels collided, and according to the captain, the Got ‘M On’s port bow area began taking on water. The flying bridge structure and tuna tower of the Got ‘M On toppled to the water. The captain of the Got ‘M On had the passengers head to the stern of the vessel.
Collision regulations require all vessels to keep a proper lookout and proceed at a safe speed. It is likely that the captain spent longer than two to three minutes off the flying bridge given that he should have seen the Lady Toni visually or by RADAR well in advance of the collision. At 28 knots the vessel is covering less than one mile every two minutes. With RADAR set to six miles, that is at least 12 minutes of warning to plot the course and speed of the give-way vessel and confirm that they are altering course and speed to avoid a collision. The captain should not have left the navigation bridge unattended, especially while operating at such a high rate of speed. The Lady Toni captain stated that about five minutes before the collision they noticed the Got ‘M On about five to six miles away approaching them. After the deckhand and captain confirmed the vessel’s continued approach on the RADAR, they discussed turning the Lady Toni to port. The captain stated that he tried calling the other vessel four or five times on VHF channel 16, but received no answer and exited the starboard wheelhouse door twice, first to look at the approaching vessel and second to “flag” it, but saw no one on board.
About 30 seconds before impact, the Lady Toni crew realized they were going to hit, and according to the wheelhouse deckhand the captain slowed the vessel and turned it to port. However, both of the Double Oak deckhands stated that they saw no one on the decks or at the conning stations of either vessel, that neither the Got ‘M On nor the Lady Toni changed course or speed and that they heard no radio transmission from either vessel. Regulations require the “give-way” vessel, the Lady Toni, because the Got ‘M On was crossing from the Lady Toni’s starboard side to take action to prevent a collision. Additionally, if any vessel is in doubt of what the other vessel is doing, it must sound the danger signal of five short blasts of the whistle.
If the Lady Toni captain had detected the Got ‘M On five to six miles away, he should have taken action to avoid the collision. The probable cause of the collision between sportfishing vessel Got ‘M On and commercial fishing vessel Lady Toni was the failure of the Lady Toni captain to take appropriate action to avoid the collision, and the Got ‘M On captain’s failure to safely operate his vessel by leaving the bridge unattended with the autopilot engaged and traveling at 28 knots.
It has been 100 years since the first autopilot was installed on a merchant ship, and today autopilots on our power-driven vessels are ubiquitous. But at one time, they were highly desired but rare safety devices on both power and sail vessels. For nearly a century, autopilots have been making navigation safer and more convenient. Mariners have called autopilots by nicknames like “Iron Mike”, “Otto” or “the silent crew.”

Autopilot systems can reduce the monotony of steering by freeing the yachtsman to step away from the helm in order to perform other minor tasks and gain different navigational viewpoints by moving around the bridge or to a different steering station. Autopilots allow short or single-handed sailors and boaters to leave the helm to trim or rig sails, adjust lines, set anchors, eat without interruption or other activities while not at the helm. There are also disadvantages that have the potential to lead to negligent navigational practices. Over reliance on these systems can allow an operator to get complacent or engrossed in performing other tasks, and in some extreme cases, can lead to the operator leaving the helm for extended periods of time. This inattentiveness to the vessel’s navigation has led to many marine incidents. It should come as no surprise that when an inattentive operator meets with extreme circumstances, he or she usually has no time to take corrective actions. Also, in some past incidents when there was time to take corrective action, the operator’s lack of system knowledge hindered the need to rapidly change over from autopilot to manual steering.
An autopilot is a combination of electric or electronic navigation tools that steer a vessel without continual hands-on involvement by the helmsman. The heart of an autopilot is the electronic compass. In early systems, this was a gyrocompass and still is on some merchant vessels, while today we use fluxgate or satellite compasses on our recreational vessels. The gyrocompass is a compass with one or more gyroscopes as the directive element, and indicates true north rather than magnetic north. Its other major advantage is that, unlike a magnetic compass, it is not affected by external magnetic fields such as those created by ferrous metals in the ship.

Due to the gyroscopic effect, the compass will continue to point in the direction parallel to the rotational axis of the earth regardless of the orientation of the ship in which it is mounted. The gyrocompass was invented in the early 1900’s, and the first application was the installation of the Sperry MK1 gyrocompass in 1911 on the USS Delaware. After successful sea trials and leading up to World War 1, the Chief of Naval Ordinance had Sperry develop a gyro fire control system for the warship gun batteries. A few years later, Sperry developed the first gyro pilot system for ships’ steering, and called it Iron Mike. In 1922, field trials commenced on the Sperry standard Gyro-Pilot with the first recorded Atlantic crossing of a ship under complete gyro autopilot control.
Wood Freeman produced the first commercial autopilot system in 1934 and patented it. He founded the Tacoma, Washington-based company, Metal Marine Pilot, whose business was providing a range of marine autopilot systems until 2004. Today there are several manufacturers providing complete autopilot systems for the recreational and commercial markets. For the recreational market, the big four navigation system providers all have good autopilot systems integrating well with any manufacturer’s navigation systems. Look for the feature set that you want and choose the best autopilot for your needs.
The Simrad AP48 has an intuitive interface with a large rotary control dial and dedicated dodge keys. The large full color display uses transflective LCD technology that brightens in full sunlight, rather than being washed out. It is very reliable and one of my favorite autopilot systems.
The Raymarine EV150 is designed for the small to medium sized vessel utilizing hydraulic steering. The 150 is the latest of the Raymarine Evolution series that uses the award-winning TrackIQ algorithm for better tracking. The system is easy to set up with fully automatic calibration and easy to use with a full color dedicated control head.

Garmin GHP Reactor 40 is one of the best hydraulic autopilot systems around. The best feature of the GHP is the patented “shadow drive” technology that automatically disengages the autopilot if you take the helm, and then reengages as soon as you hold a steady course. No looking around in a panic for the standby button while you are trying to dodge an object.

The Furuno Navpilot 300 is ideal for center consoles with outboards or drive by wire systems on small to mid-sized boats. It features a four-inch color LCD display and a Gesture Controller, which allows you to simply point and shoot in any direction, controlling your vessel’s steering from anywhere on board within ten meters of the helm. Using the Gesture Controller, simply push the button, point to the desired heading and release the button to let the autopilot redirect the boat.
If you are looking for an autopilot that has more of the commercial features, two good choices are Comnav and SiTex.
The Comnav P4 has the largest display of all autopilot systems, a five-point-seven-inch color VGA screen. Along with the industrial grate encoder switch and a separate tiller control, the P4 is a workhorse for the commercial operations and fishing vessels. If you have ever used a tiller control for steering or control of the autopilot, you will know why this is one of my must-have accessories.

The SiTex SP38 is a feature-packed professional autopilot, ideal for a wide range of power boats and commercial vessels up to about 100 feet in length. Intelligent Steering Technology (IST) learns vessel characteristics over time, and fine-tunes itself for optimum performance. Professional features include Nav Mode for adaptive and precise track steering and Automatic Leeway Compensation (ALC) that adjusts for the effects of drift, tide and wind. An optional bow thruster interface is available for precision drift, fishing and hands-free station keeping.

Autopilot Basics
With most of the above autopilot systems, the skipper steadies the vessel on a desired heading for a few seconds, an “Auto” button is pushed and the autopilot takes over. The computer remembers the heading and adjusts rudder position to keep the vessel on the selected course, even in high winds, strong currents or over and under steering situations. If you have interfaced the autopilot to your navigation system, all the above products have a “track” mode that will steer the vessel to either a single waypoint or follow a track that consists of several waypoints.
Autopilots generally consist of three main components: a course computer, also called a central processing unit that contains a compass, a drive unit that applies force to move the rudder and a control unit. The course computer usually contains the electronic compass that generates the vessel’s heading. The most common electronic compasses are the fluxgate that uses magnetic properties and provides electronic data that can be interfaced with the chart plotter and RADAR. The fluxgate provides a stable long term directional reference, and works with the rate compass. The rate compass provides data of the angular change relative to a course bearing over a short period, and provides fast and accurate data to correct fluxgate compass errors. The drive unit moves the rudder with either an electric actuator or hydraulic power. The final piece is the control unit which is the interface to the helmsman.
Autopilots provide the boat operator with several advantages and a few disadvantages. By steering a straight line in all but the worst conditions, the autopilot can steer the vessel better than most helmsmen, and you will save both time and fuel with the autopilot steering the boat. Most of the systems today have preprogrammed trolling patterns that can make fishing more productive and with less intervention by the fishing skipper. Disadvantages to be aware of include the inability of the autopilot to safely steer the vessel in heavy weather, especially if the drive system you have chosen is undersized for the vessel. Even for short periods, an unattended helm with an engaged autopilot is unsafe; always keep a proper watch. In some conditions, navigating a vessel with an engaged autopilot can create potentially dangerous conditions. For example, if underway on waterways with heavy vessel traffic, known underwater hazards, shallow water or areas where pot fishing is common, the helm should be manned. The autopilot should not be engaged while docking or maneuvering in close quarters.
Since not all autopilots operate the same and the controls differ between manufacturers, be certain to brief any crewmember taking the helm on how to disengage the autopilot if needed. Some of the newer units use the interfaced RADAR and Chartplotter to detect obstructions or vessels, and if a threat exists, they will automatically steer a safe heading and sound an alarm. Professional models have functions that will determine if the vessel is about to surf down a wave, and will alter course to steer to the next set of waves. One model even has a transmitter worn by the crew, so that if one of them goes overboard it will steer so that the man overboard can be retrieved.
Lesson Learned
Why do I say safety device? Think about the last time you had to steer your boat for hour after hour and try to keep on a particular heading. It is easy to get fatigued, especially in rough water and difficult to keep a constant heading. When we are fatigued and have most of our brain power focused on holding a course, all other aspects of collision avoidance will suffer. Trying to focus on the RADAR and do some navigating or other task, and having to steer a course in rough water with the boat pitching and rolling will wear you out quickly, and that is when we make mistakes. Installed and calibrated correctly and utilized as intended, autopilots of any size and type can enhance enjoyment, efficiency and safety during a voyage. When I say the autopilot lets me pay attention to other stuff, I mean keeping an even better lookout for whatever is out there on the water, other boats, personal watercraft, skiers, kayakers, floating logs or crab pots. On long passages, helm fatigue can lead to slow reactions, poor judgment and even nodding off to sleep. The autopilot helps to avoid those problems. An autopilot is particularly helpful when navigating in limited visibility, such as in fog. Steering a straight course is difficult when you cannot see past the bow rail and not everyone is practiced on using the ship’s magnetic compass to steer, but the autopilot can keep a steady course. It is a best practice to take manual control of the helm whenever you are passing beneath a bridge or when in close proximity to large steel ships. Recent accident investigations indicate that there have been incidents in which the fluxgate compass that directs the autopilot to follow a prescribed course can be suddenly influenced by the massive amount of steel in bridge support members and ships, leading to disaster.
Until next month I am going to sit back, enjoy a fine port and cigars as I watch my new autopilot follow a route around San Francisco Bay. I might even try the special fishing modes to see if that helps me catch fish. Of course, I will probably have to put some bait in the water to catch anything.
Until next month, please keep those letters coming. Even the ones where you slam me for my oversights. Have a good story to tell, I love a good story. Have good photos of right and wrong, please send them and I will include them in next edition of “is it right or is it wrong.” patcarson@yachtsmanmagazine.com
P.S.
Think your Seakeeper, Mitsubishi, or VEEM Gyro stabilizer is new? Nope. In 1913 Sperry provided the U.S. Navy with its first gyro stabilizer system. The gyro weighed 10,000 pounds and was installed on the USS Worden, a small 700-ton destroyer. The gyro worked as expected and kept the ship from rolling, so the Navy ordered a second trail unit and installed it aboard the submarine E4. Unfortunately, WW1 started and the Navy cancelled further orders as the stabilizer was not considered essential equipment.


